

Diferencia en el rendimiento del motor 1: velocidad/par/tamaño
En el mundo existen todo tipo de motores: grandes y pequeños. Algunos se mueven hacia adelante y hacia atrás en lugar de girar. Otros, a primera vista, resultan caros. Sin embargo, todos los motores se eligen por una razón. Entonces, ¿qué tipo de motor, qué rendimiento o características debe tener el motor ideal para ti?
El objetivo de esta serie es brindar información sobre cómo elegir el motor ideal. Esperamos que les sea útil al momento de elegir un motor y que les ayude a comprender los conceptos básicos sobre motores.
Las diferencias de rendimiento que se explicarán se dividirán en dos secciones separadas, como sigue:
Velocidad/Par motor/Tamaño/Precio ← Los elementos que trataremos en este capítulo
Velocidad, precisión, suavidad, vida útil y facilidad de mantenimiento, generación de polvo, eficiencia y calor.
Generación de energía/vibración y ruido/contramedidas de escape/entorno de uso
1. Expectativas para el motor: movimiento rotacional
Un motor generalmente se refiere a un motor que obtiene energía mecánica a partir de energía eléctrica, y en la mayoría de los casos se refiere a un motor que genera movimiento rotacional. (También existe un motor lineal que genera movimiento rectilíneo, pero no lo incluiremos en este caso).
Entonces, ¿qué tipo de rotación desea? ¿Quiere que gire con fuerza como un taladro, o que gire con poca fuerza pero a alta velocidad como un ventilador eléctrico? Al centrarnos en la diferencia en el movimiento de rotación deseado, las propiedades de la velocidad de rotación y el par motor se vuelven importantes.
2. Par motor
El par motor es la fuerza de rotación. La unidad de par motor es N·m, pero en el caso de motores pequeños, se suele utilizar mN·m.
El motor ha sido diseñado de diversas maneras para aumentar el par motor. Cuantas más vueltas tenga el cable electromagnético, mayor será el par motor.
Debido a que el número de vueltas está limitado por el tamaño fijo de la bobina, se utiliza alambre esmaltado con un diámetro mayor.
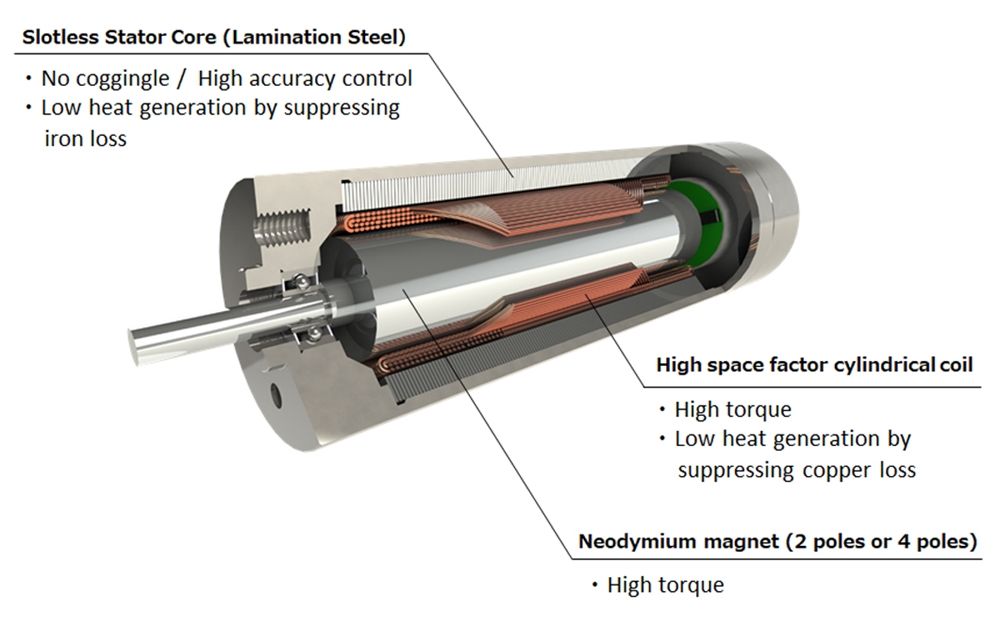
Nuestra serie de motores sin escobillas (TEC) cuenta con 8 tipos de diámetros exteriores de 16 mm, 20 mm, 22 mm, 24 mm, 28 mm, 36 mm y 42 mm, con un diámetro exterior de 60 mm. Dado que el tamaño de la bobina también aumenta con el diámetro del motor, se puede obtener un par motor mayor.
Se utilizan imanes potentes para generar grandes pares sin modificar el tamaño del motor. Los imanes de neodimio son los imanes permanentes más potentes, seguidos de los de samario-cobalto. Sin embargo, incluso utilizando imanes potentes, la fuerza magnética se disipará del motor y esta pérdida no contribuirá al par motor.
Para aprovechar al máximo el fuerte magnetismo, se lamina una fina lámina de material funcional llamada placa de acero electromagnético para optimizar el circuito magnético.
Además, debido a que la fuerza magnética de los imanes de samario-cobalto es estable ante los cambios de temperatura, el uso de imanes de samario-cobalto puede impulsar el motor de forma estable en un entorno con grandes variaciones de temperatura o altas temperaturas.
3. Velocidad (revoluciones)
El número de revoluciones de un motor se suele denominar «velocidad». Indica cuántas veces gira el motor por unidad de tiempo. Aunque comúnmente se utiliza la abreviatura «rpm» para referirse a las revoluciones por minuto, también se expresa como «min⁻¹» en el Sistema Internacional de Unidades (SI).
En comparación con el par motor, aumentar el número de revoluciones no presenta dificultades técnicas. Basta con reducir el número de espiras de la bobina para incrementar el número de vueltas. Sin embargo, dado que el par motor disminuye a medida que aumenta el número de revoluciones, es importante cumplir con los requisitos tanto de par como de revoluciones.
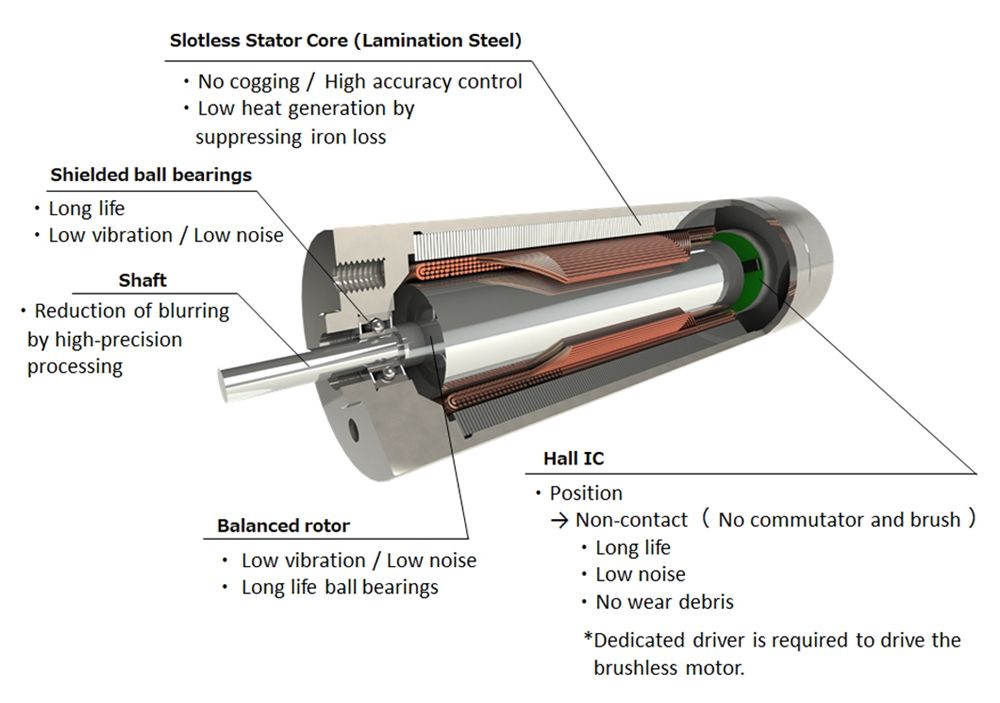
Además, si se va a utilizar a alta velocidad, es preferible usar rodamientos de bolas en lugar de cojinetes lisos. Cuanto mayor sea la velocidad, mayor será la pérdida por fricción y menor la vida útil del motor.
Dependiendo de la precisión del eje, cuanto mayor sea la velocidad, mayores serán los problemas relacionados con el ruido y las vibraciones. Dado que un motor sin escobillas no tiene ni escobillas ni conmutador, produce menos ruido y vibraciones que un motor con escobillas (en el que las escobillas están en contacto con el conmutador giratorio).
Paso 3: Tamaño
En lo que respecta al motor ideal, su tamaño es un factor importante para su rendimiento. Aunque la velocidad (revoluciones) y el par motor sean suficientes, no sirve de nada si no se puede instalar en el producto final.
Si solo se desea aumentar la velocidad, se puede reducir el número de vueltas del cable, incluso si el número de vueltas es pequeño, pero a menos que haya un par mínimo, no girará. Por lo tanto, es necesario encontrar maneras de aumentar el par.
Además de utilizar los potentes imanes mencionados anteriormente, también es importante aumentar el ciclo de trabajo del bobinado. Hemos hablado de reducir el número de vueltas del hilo para garantizar el número de revoluciones, pero esto no significa que el hilo esté enrollado de forma floja.
Al utilizar alambres gruesos en lugar de reducir el número de espiras, se puede lograr una gran corriente y un par motor elevado incluso a la misma velocidad. El coeficiente espacial indica la densidad del bobinado del alambre. Tanto si se aumenta el número de espiras finas como si se reduce el de espiras gruesas, este factor es crucial para obtener un par motor óptimo.
En general, la potencia de un motor depende de dos factores: el hierro (imán) y el cobre (bobinado).
Fecha de publicación: 21 de julio de 2023