


Los robots teledirigidos se utilizan cada vez más en situaciones de emergencia, como la búsqueda de supervivientes de edificios derrumbados.

La detección de materiales potencialmente peligrosos, situaciones de rehenes u otras medidas policiales y antiterroristas. Este equipo especial de operación remota utiliza micromotores de alta precisión en lugar de personal humano para llevar a cabo las operaciones peligrosas necesarias, lo que reduce significativamente el riesgo para el personal involucrado. El manejo preciso de las herramientas es fundamental.
A medida que la tecnología continúa evolucionando y mejorando, los robots pueden aplicarse a tareas más complejas y desafiantes. Como resultado, su uso se ha vuelto cada vez más frecuente en emergencias demasiado peligrosas para los humanos, como parte de operaciones industriales, fuerzas del orden o medidas antiterroristas, por ejemplo, para identificar objetos sospechosos o desactivar bombas. Debido a estas condiciones extremas, estos vehículos manipuladores deben ser lo más compactos posible para cumplir con requisitos específicos. Sus brazos de agarre deben permitir patrones de movimiento flexibles, demostrando al mismo tiempo la precisión y la potencia necesarias para realizar diversas tareas. El consumo de energía también es fundamental: cuanto más eficiente sea el motor, mayor será la duración de la batería. Los micromotores especiales de alto rendimiento se han convertido en una parte importante del campo de los robots de control remoto, ya que satisfacen perfectamente estas necesidades.
Esto también se aplica a los robots de reconocimiento más compactos.

Equipados con cámaras y, en ocasiones, lanzados directamente al lugar de uso, estos vehículos deben ser capaces de soportar golpes, vibraciones, polvo y altas temperaturas en zonas potencialmente peligrosas. En estos casos, ningún operario puede acudir directamente a buscar supervivientes. Los vehículos terrestres autónomos (UGV) sí pueden hacerlo. Gracias al micromotor de CC FAULHABER, junto con un reductor planetario que aumenta el par motor, son extremadamente fiables. Su reducido tamaño permite realizar búsquedas sin riesgo en edificios derrumbados y enviar imágenes en tiempo real, lo que los convierte en una herramienta fundamental para la toma de decisiones de los equipos de emergencia en situaciones de emergencia.
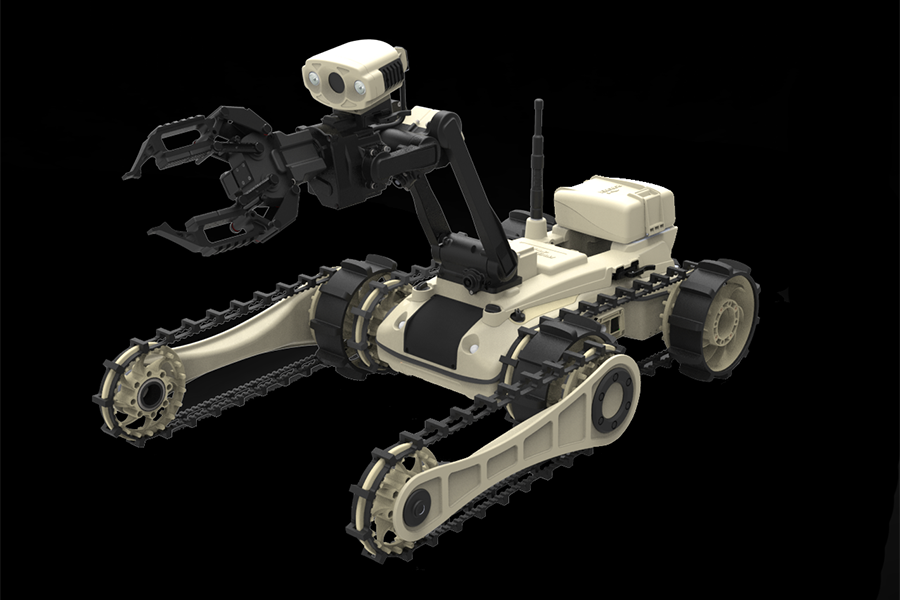
Motor de CC de precisión y engranaje integrados en un dispositivo de accionamiento compacto, apto para diversas tareas de conducción. Estos robots son robustos, fiables y económicos.
En la actualidad, los robots móviles se utilizan habitualmente en situaciones críticas donde existe un riesgo significativo para los seres humanos y en ciertas partes de las operaciones industriales.

Medidas policiales o antiterroristas, como la identificación de objetos sospechosos o la desactivación de bombas. En estos casos extremos, estos "operadores de vehículos" deben cumplir con requisitos específicos. La manipulación precisa y el manejo exacto de herramientas son dos requisitos básicos. Por supuesto, el dispositivo también debe ser lo más pequeño posible para poder pasar por pasillos estrechos. Naturalmente, los actuadores que utilizan estos robots son extraordinarios. Los micromotores especiales de alto rendimiento se han convertido en un componente fundamental.

Dicho esto, levantar 30 kg con el brazo ya supone un reto considerable.
Al mismo tiempo, ciertas tareas requieren precisión en lugar de fuerza bruta. Además, el espacio para el brazo robótico es muy limitado. Por lo tanto, los actuadores ligeros y compactos son imprescindibles para las pinzas. Para cumplir con estos exigentes requisitos, es fundamental que la pinza pueda girar 360 grados, manteniendo la precisión y la capacidad necesarias para realizar diversas tareas.
El consumo de energía también juega un papel clave al utilizar dispositivos alimentados por batería. Cuanto mayor sea la eficiencia de transmisión, mayor será el tiempo de servicio. El "problema de accionamiento" se resuelve utilizando un micromotor de CC con engranajes planetarios y frenos. El motor de la serie 3557 puede funcionar hasta 26 W a una tensión nominal de 6-48 V, y junto con el engranaje preestablecido de la serie 38/2, pueden aumentar la fuerza de accionamiento a 10 Nm. Los engranajes totalmente metálicos no solo son robustos sino también insensibles a las cargas máximas transitorias. Las relaciones de desaceleración se pueden seleccionar de 3,7:1 a 1526:1. El engranaje compacto del motor debe estar dispuesto de forma ajustada en la región superior del manipulador. El frenado integrado garantiza la posición final en caso de fallo de alimentación. Además, los componentes compactos son fáciles de mantener y las piezas rotas se pueden reemplazar rápidamente. Otra ventaja clave: los potentes motores de CC con escobillas solo requieren controles sencillos de limitación de corriente. La retroalimentación de la intensidad de la corriente se aplica a la palanca de control remoto mediante contrapresión, lo que proporciona al operador una sensación de fuerza para accionar la pinza o "muñeca". El conjunto de accionamiento compacto se compone de un motor de CC de precisión y un engranaje de ajuste. Adecuado para diversas tareas de accionamiento. Son potentes, fiables y económicos. El funcionamiento sencillo del motor de componentes estándar cumple con los requisitos de bajo costo, rapidez y fiabilidad.